Hardware●●●Banger
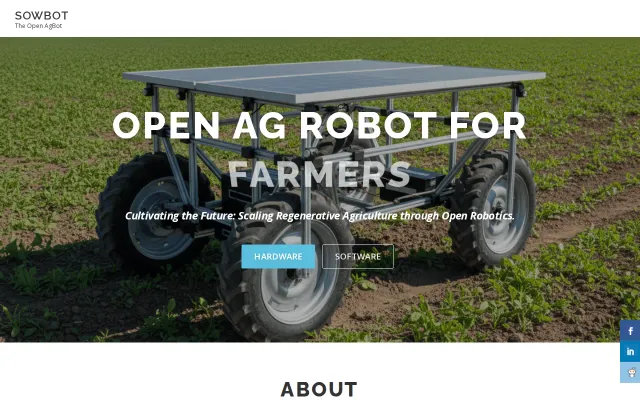
Sowbot – open-hardware agricultural robot (ROS2, RTK GPS)
Open ag-bot closes the '18-month prototype gap' that kills agri-robotics startups.
Zero to OneWizardryBold Bet
Sabrees
181453mo ago
The unified API layer for robotics. Connect any robot, any brand, with one SDK. Like Stripe, but for robots.
Ambitious Stripe for robots pitch, but rosbridge HTTP wrappers already exist.
Robotics engineers building web dashboards or integrations
rosbridge_suite · Foxglove · Orchestrate
RoboAPI is a unified API layer that abstracts all of that into one clean developer experience. One SDK, one API key, any robot — simulated or real hardware.
You can connect a simulated robot and read live telemetry in under 5 minutes:
pip install fastapi uvicorn roslibpy uvicorn api.main:app --reload curl -X POST localhost:8000/v1/robots/connect -d '{"robot_id":"bot-01","brand":"simulated"}' curl localhost:8000/v1/robots/bot-01/sense
It also connects to real ROS2 robots via rosbridge — I tested it today controlling a turtlesim robot drawing circles through the API.The architecture is pluggable — each robot brand is a separate adapter implementing a common interface (like a payment gateway in Stripe). Adding a new brand means one file.
Currently supports: simulated robots and any ROS2 robot. Boston Dynamics and Universal Robots adapters are next.
Would love feedback from anyone working in robotics — especially on the API design and what's missing for real-world use.
Open ag-bot closes the '18-month prototype gap' that kills agri-robotics startups.
Modular brain-body layer, but needs proof that swapping providers actually works seamlessly.
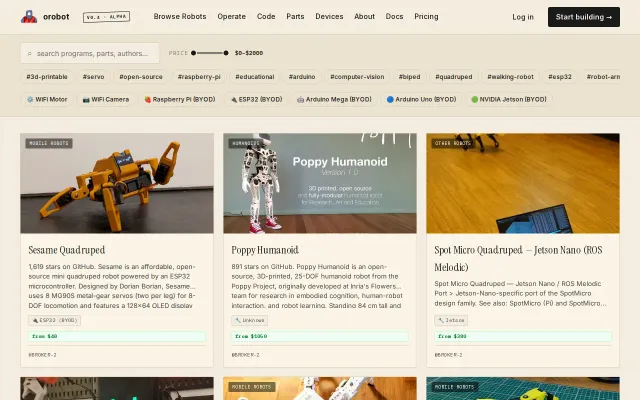
61 printable robots with LLM-written install scripts — way better than digging through Thingiverse.
Multi-domain agent data synthesis, but execution clarity and real benchmarks unclear.
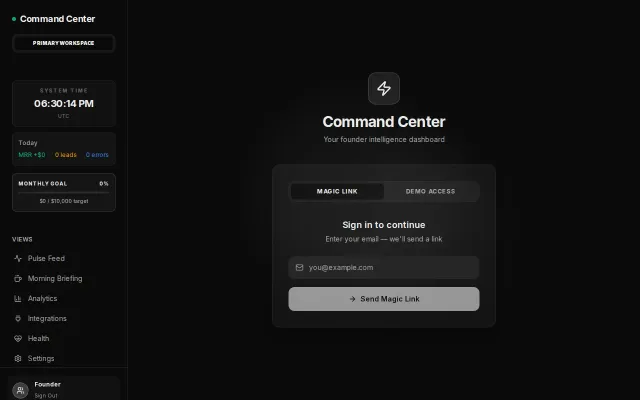
Multi-tool aggregator dashboard lands in crowded category; Zapier, Make, PagerDuty already own this.
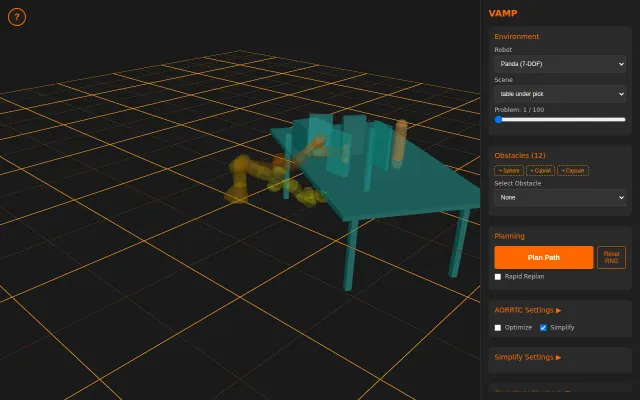
Real-time motion planning in the browser via WASM beats native tools for accessibility.