Infrastructure●●Solid
RoboAPI – A unified REST API for robots, like Stripe but for hardware
Ambitious Stripe for robots pitch, but rosbridge HTTP wrappers already exist.
Ship ItSolve My Problem
xmas123
1122mo ago
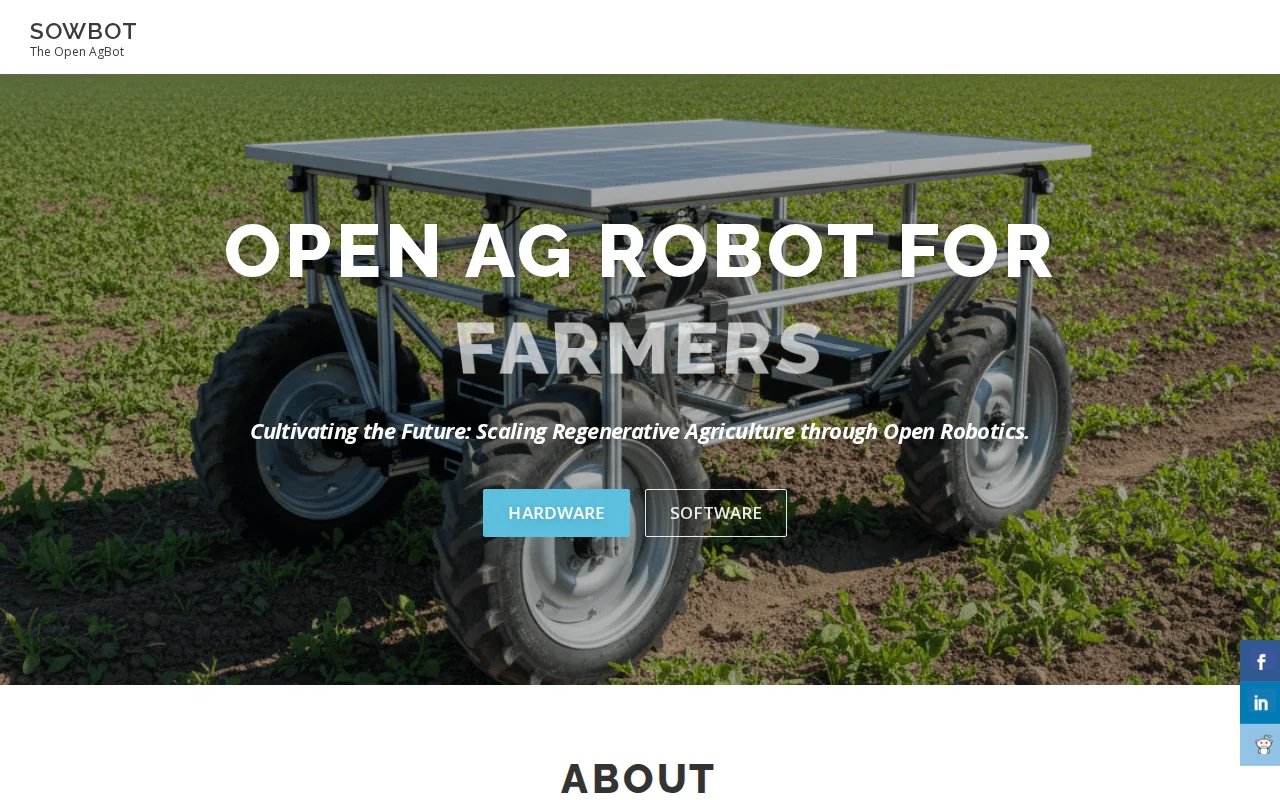
Open ag-bot closes the '18-month prototype gap' that kills agri-robotics startups.
Agricultural researchers, robotics startups, open-hardware enthusiasts
YOR bimanual robot · Clearpath Jackal · NVIDIA Jetson ecosystem
The hardware is built around a stackable 10×10cm compute module with two ARM Cortex-A55 SBCs — one for ROS 2 navigation/EKF localisation, one dedicated to vision/YOLO inference — connected via a single ethernet cable.
Centimetre-level positioning via dual RTK GNSS, CAN bus for field comms, and real-time motor control via ESP32 running Lizard firmware.
Everything — schematics, PCB layouts, firmware — is under open licences. The software stack runs on RoSys/Field Friend (for teams who want fast iteration) or DevKit ROS (for teams already in the ROS ecosystem). The idea is that a lab in one country can reproduce another lab's experiment by sharing a Docker image.
Current status: the Open Core brain is largely fabricated, the full-size Sowbot body has a detailed BOM but isn't yet assembled, and we have two smaller dev platforms (Mini and Pico) in various stages of testing.
We're a small volunteer team and we're looking for contributors — hardware, ROS, firmware, docs, whatever you can offer.
The best place to start is our Discord: https://discord.gg/SvztEBr4KZ — we have a weekly call if you'd prefer to just show up and chat.
GitHub: https://github.com/Agroecology-Lab/feldfreund_devkit_ros/tre...
Ambitious Stripe for robots pitch, but rosbridge HTTP wrappers already exist.
Full ROS2 stack in browser beats painful local installs.
Complete ROS2 Jazzy quadruped build log with manually coded walk gait and turning.
Modular brain-body layer, but needs proof that swapping providers actually works seamlessly.
Bimanual mobile manipulator for $10k that replaces $50k+ proprietary systems, fully open-source.
Decorators + auto-typed ROS messages cut AI-to-robot boilerplate by 80%.