Developer Tools●●●Banger
Universal ROS bridge for AI agents – control robots with LLMs
Decorators + auto-typed ROS messages cut AI-to-robot boilerplate by 80%.
WizardrySolve My ProblemShip It
webthree549
213mo ago
ROS 2 sensor fusion SDK: UKF, 3D native, proper GNSS, zero manual tuning. Apache 2.0.
Beats robot_localization on 5 of 6 benchmarks with zero manual tuning.
Robotics engineers, ROS 2 developers
robot_localization · fuse
FusionCore is a 22 state UKF that fuses IMU, wheel encoders, and GPS in ECEF directly (no coordinate projection, no extra node). It estimates IMU bias, adapts its noise covariance automatically from the innovation sequence, and gates outliers with a chi squared test on every sensor.
I benchmarked it against robot_localization EKF on 6 sequences from the NCLT public dataset (University of Michigan, real robot, real GPS, RTK ground truth). It wins 5 of 6. On the 6th sequence (fall, degraded GPS over a long period) it loses badly. RL UKF diverged to NaN on all six.
Configs, methodology, and full reproduce instructions are in the benchmarks/ folder.
Decorators + auto-typed ROS messages cut AI-to-robot boilerplate by 80%.
LLM-filtered arXiv digest with Zotero PDF sync for robotics researchers.
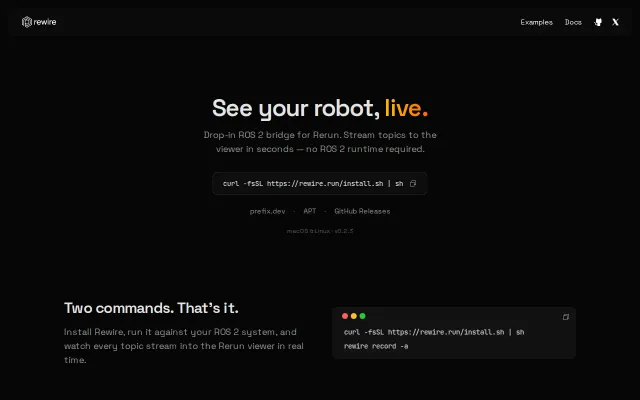
Bypasses ROS 2 runtime entirely to stream topics directly into Rerun viewer.
Open-source Dex-Hand clone with Hall-effect glove teleoperation for sim2real testing.
Publishes benchmarks where tuned grep beats them—that's actual research integrity.
Hybrid BM25 + vector search via MCP beats pure keyword or pure semantic for API docs.