Hardware●●●Banger
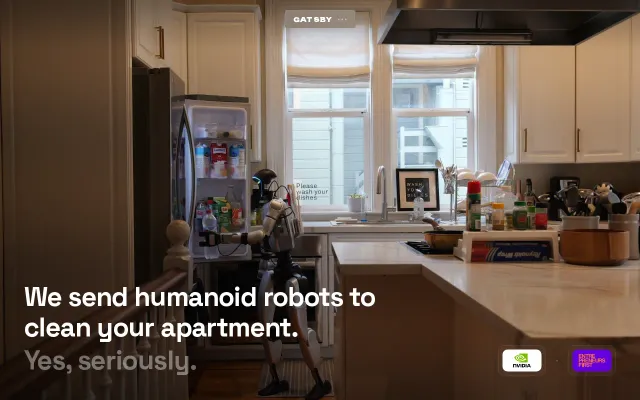
We sent a humanoid robot to clean a stranger's apartment in SF
First humanoid robot cleaning service in the US — no humans, just robots.
Zero to OneBold Bet
frishberg
6429d ago
Open-source Dex-Hand clone with Hall-effect glove teleoperation for sim2real testing.
Robotics researchers, hardware hobbyists, RL engineers
Dex-Hand · Project Homunculus · Shadow Robot Company
I tried to cold email several robotics systems integrator companies, but I had trouble finding a way to monetize it and ended up pivoting.
The original idea was to use this as a testbed to refine sim2real transfer and robot RL policies.
I assembled the hand from this open-source design: https://www.dexhand.org/
The Hall-Effect sensor glove is built from this open-source design: https://github.com/nepyope/Project-Homunculus
First humanoid robot cleaning service in the US — no humans, just robots.
Uses skyfield to compute the current one-way light-time to Mars and inserts that latency into an LLM-backed chat, which is a neat little realism hack that actually changes the interaction rhythm. It's a fun, well-focused demo — charming for a minute or two — but it's mainly a novelty (and gated behind an account/token model), not something that redefines chatbots.
VLCs over VLAs: LLMs write Python code against live robots instead of predicting actions.
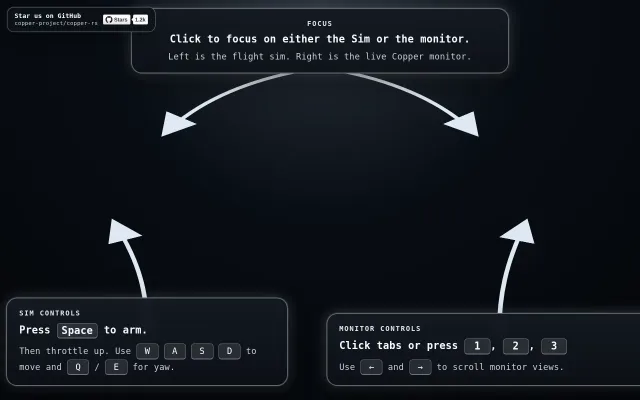
Rust robotics runtime running deterministically in WASM and on STM32 microcontrollers.
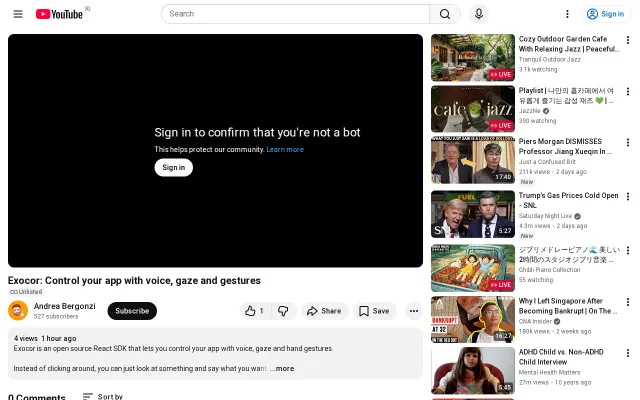
React SDK fusing voice, gaze, and gestures into one interaction layer.
Complete ROS2 Jazzy quadruped build log with manually coded walk gait and turning.