Infrastructure●●●Banger
Aerial-autonomy-stack–Simulate and Deploy Perception-based Drones
Sim-to-real drone stack with PX4/ArduPilot integration, real working proof.
WizardrySolve My ProblemBold Bet
SufficientFix42
104mo ago
An open framework to simulate and deploy perception-based PX4/ArduPilot drone swarms with ROS2, YOLO, LiDAR, NVIDIA Jetson
One-liner 45-minute build for full drone autonomy stack is genuinely impressive.
Robotics researchers and drone developers
PX4 · ArduPilot · ROS2
aerial-autonomy-stack aims to solve this by collapsing (1) multi-robot, (2) software-in-the-loop, (3) hardware-in-the-loop simulation, (4) CI/CD, and (5) deployment into a single containerized workflow.
The end-to-end stack can be re-created/simulated with a one-liner (45') build on Ubuntu >=22.
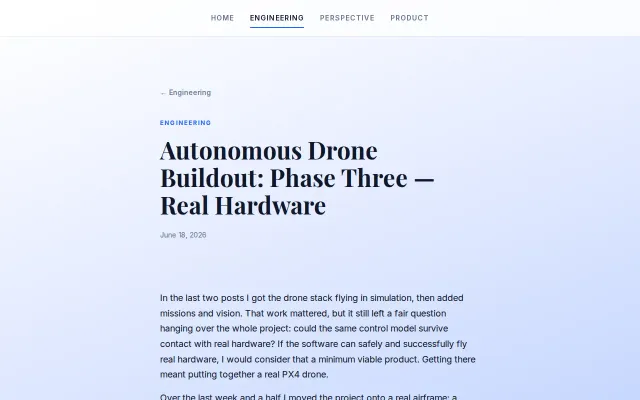
Sim-to-real drone stack with PX4/ArduPilot integration, real working proof.
Honest hardware bring-up log showing failed hover attempts and prop conventions diagnosis.
Userspace Tailscale networking for Apple containers avoids kernel TUN limitations securely.
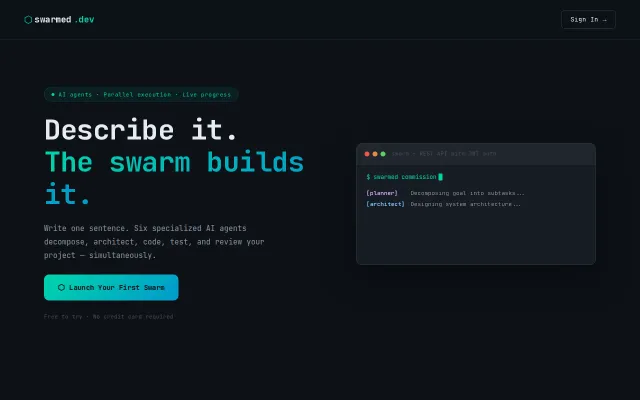
Six parallel AI agents build full-stack apps, aiming for an agent-forged registry.
Well-written essays, but a PDF download isn't a software project.
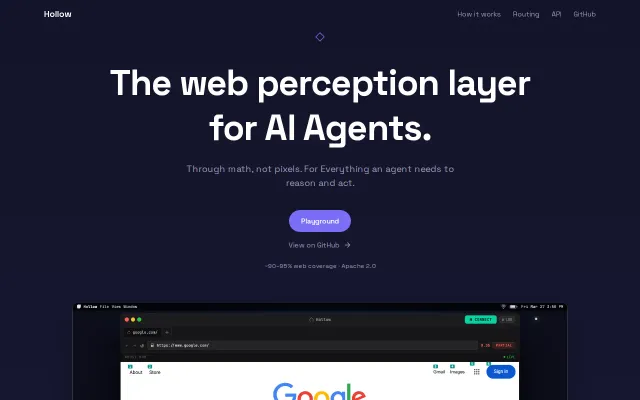
Replaces heavy headless browsers with Yoga layout math for 95% cheaper agent browsing.