Hardware●●Solid
Cubic Doggo, a Open-Source 12-DOF 4-Legged Robot Based on ROS2
Complete ROS2 Jazzy quadruped build log with manually coded walk gait and turning.
Niche GemCozy
SphericalCowww
6125d ago
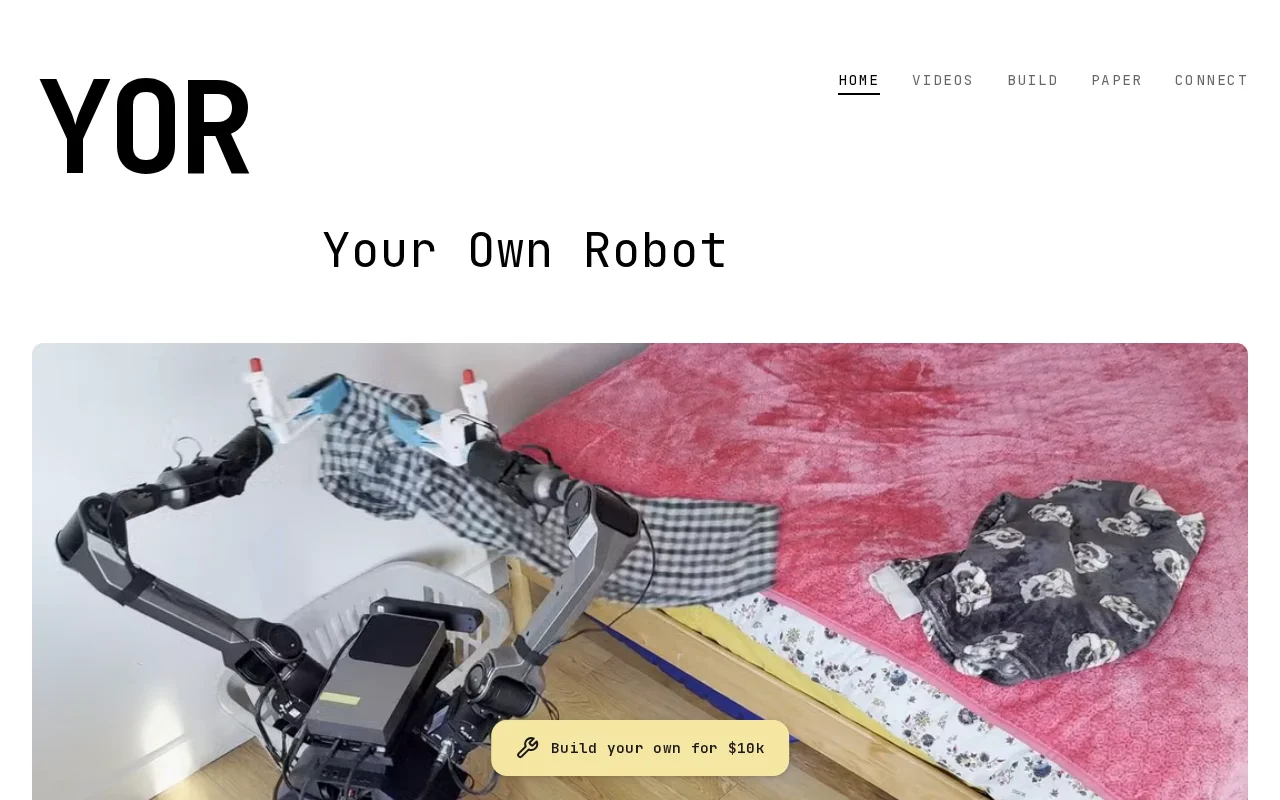
Bimanual mobile manipulator for $10k that replaces $50k+ proprietary systems, fully open-source.
Roboticists, AI/ML researchers, hardware hackers, academic labs seeking affordable mobile manipulation platforms
Boston Dynamics Spot · NVIDIA Project Digits (software focus) · Hello Robot Stretch
We designed YOR specifically for hackers and researchers who need a capable mobile manipulator without the proprietary lock-in or $50k+ price tag.
Features:
- Omnidirectional base
- Two 6-DoF arms + telescopic lift (large workspace)
- Onboard Jetson + ZED (SLAM and inference)
- Easy to assemble with off-the-shelf components
We've validated it on whole-body control and bimanual tasks. See more demos at the website below:
Website: https://www.yourownrobot.ai/
Docs: https://build.yourownrobot.ai/
Tech report: https://arxiv.org/abs/2602.11150
Complete ROS2 Jazzy quadruped build log with manually coded walk gait and turning.
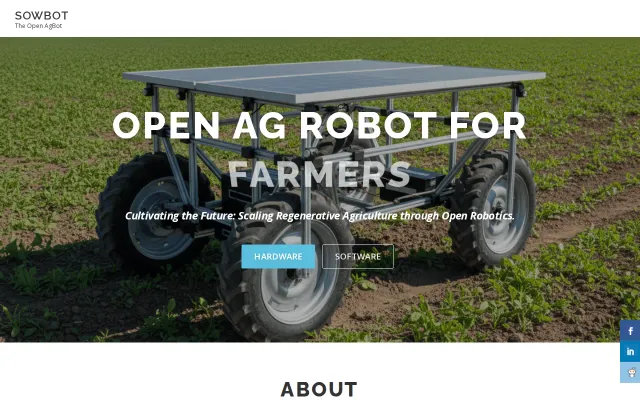
Open ag-bot closes the '18-month prototype gap' that kills agri-robotics startups.
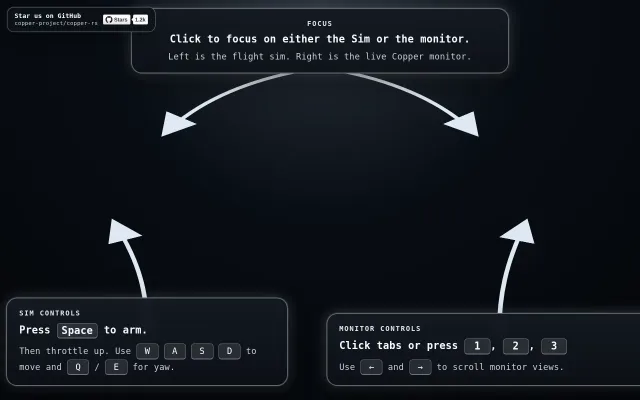
Rust robotics runtime running deterministically in WASM and on STM32 microcontrollers.
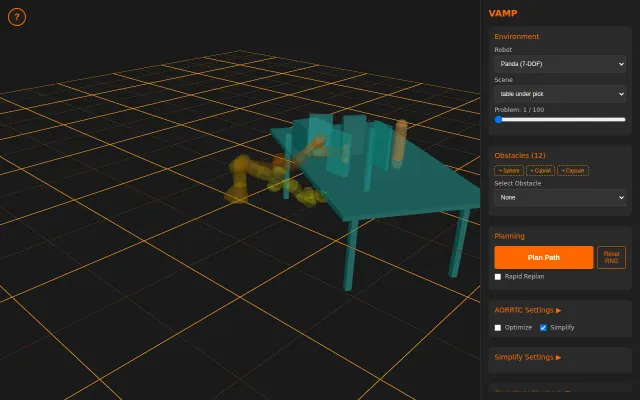
Real-time motion planning in the browser via WASM beats native tools for accessibility.
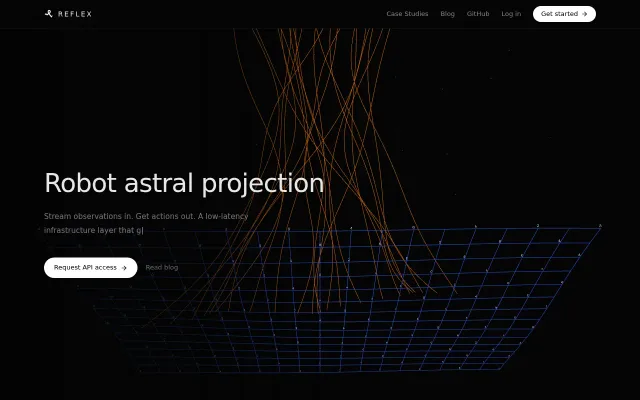
Claims 30ms cloud inference latency for robots—verify before you deploy.
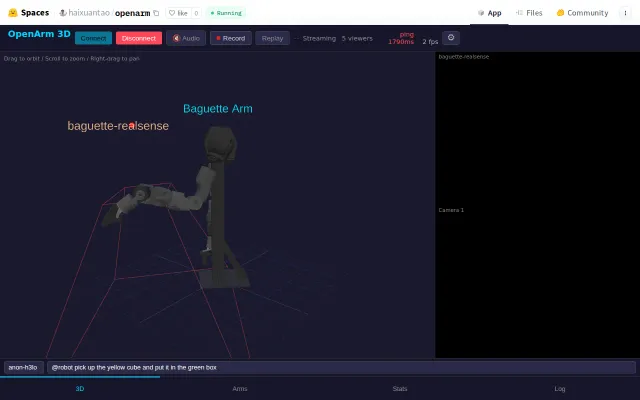
Chat-controlled robot arm livestream feels like Twitch Plays Robotics evolved.