Education●●●Banger
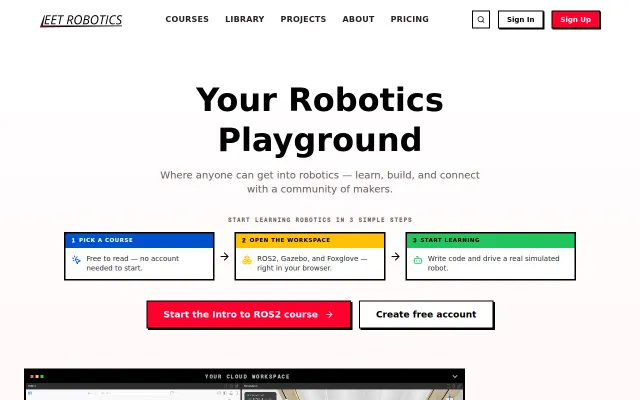
Leet Robotics: Learn robotics and ROS2 with hands-on courses
Full ROS2 stack in browser beats painful local installs.
Zero to OneNiche GemSolve My Problem
deepresearch
1214d ago
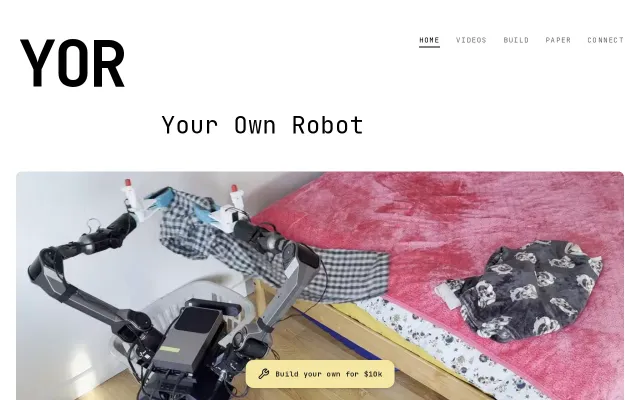
Development for a 12 Degrees-of-Freedom 4-Legged Robot
Complete ROS2 Jazzy quadruped build log with manually coded walk gait and turning.
Robotics hobbyists, ROS developers
Stanford Pupper · Unitree Go1 · Bittle
Full ROS2 stack in browser beats painful local installs.
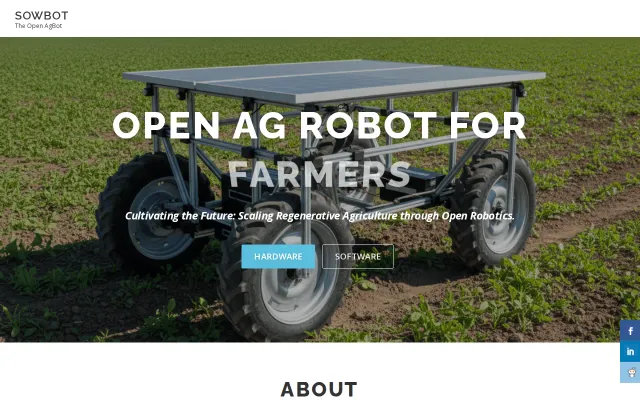
Open ag-bot closes the '18-month prototype gap' that kills agri-robotics startups.
Bimanual mobile manipulator for $10k that replaces $50k+ proprietary systems, fully open-source.
Ambitious Stripe for robots pitch, but rosbridge HTTP wrappers already exist.
Decorators + auto-typed ROS messages cut AI-to-robot boilerplate by 80%.
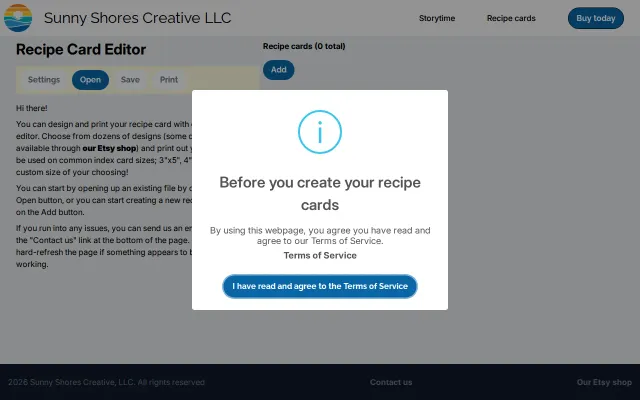
Yet another recipe tool, but the no-signup approach is refreshing.