AI/ML●●●Banger
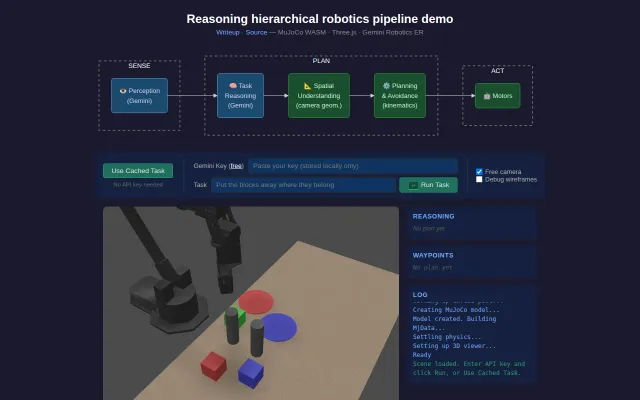
A reasoning hierarchical robotics pipeline you can run in the browser
MuJoCo physics meets Gemini reasoning entirely inside your browser tab.
WizardryBig BrainNiche Gem
avikde
402mo ago
Assembly-specific physics simulation for VLA training when Isaac Sim exists for general robotics.
Robotics researchers, ML engineers training VLA models, industrial automation developers
NVIDIA Isaac Sim · MuJoCo · PyBullet
Juakali is a physics-based data pipeline that makes robot datasets with force feedback accessible to automate assembly planning.
It simulates fittings and fastening of mechanical parts from unstructured Computer-Aided Design (CAD) files while generating high quality structured datasets used to train Vision-Language-Action models that reduce time, cost and errors in engineering systems like Google Intrinsic Flowstate.
No expensive hardware like VR headsets are needed.
Using docker containers, enginers, developers and researchers or anyone with access to assembly dataset can install and run the containers in a matter of minutes.
These complex data can also be crowdsourced and users earn revenue.
MuJoCo physics meets Gemini reasoning entirely inside your browser tab.
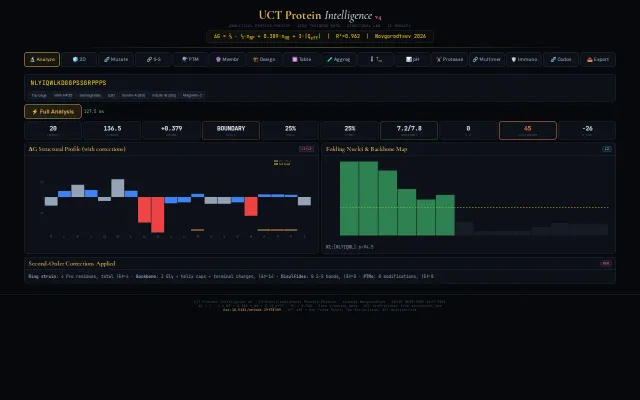
Runs full protein folding physics in the browser using zero training data.
This is a tweet, not a project—no code, demo, or tool to evaluate.
Karpathy's microgpt in C99, proves tiny coordinated models beat single large models on logic.
Adds mass and density to meshes when most 3D tools only do visuals.
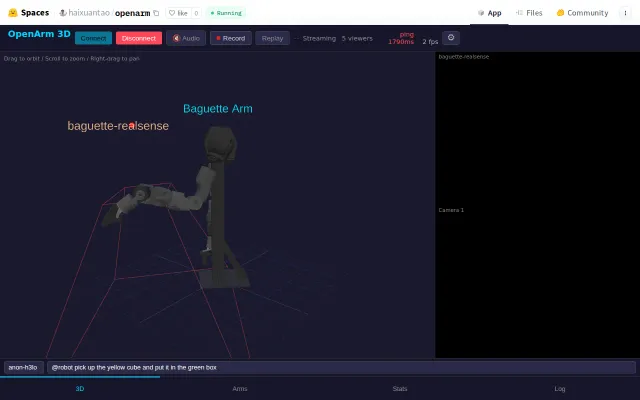
Chat-controlled robot arm livestream feels like Twitch Plays Robotics evolved.